


 当前位置:
当前位置:时间:2026-02-03 来源:控制科学与工程学院 编辑: 访问次数:10
动机和灵感
鸟类凭借翅膀翱翔天际,又用利爪精准捕猎、栖息枝头,这种飞行与交互的完美融合令人类神往。然而现有飞行机器人却陷入两难:加装机械臂虽能抓取,却因体积庞大、重量超标而丧失灵活性;简化末端执行器虽轻巧,却难以应对多变物体,更易因控制耦合导致飞行失稳。如何让飞行器既轻盈敏捷,又能像人手般灵巧操作,成为横亘在空中机器人领域的一道难题。
受人类手掌启发,我们设计了全球首款手形飞行操作机器人HI-ARM(Hand-like compact Aerial Robot for Manipulation)。它摒弃传统飞行平台+外挂机械臂的笨重架构,将抓取功能深度融入飞行本体:采用C形开放式抓取轮廓模拟手掌包裹感,5自由度手指结构融合伸缩与扭转机制,配合单电机肌腱驱动,仅用556克重量(相当于一瓶矿泉水)实现了从手掌紧握水瓶到指尖轻拈纸巾的多模态抓取。更关键的是,我们构建了毫秒级飞行轨迹规划与微秒级形变控制的解耦框架,使机器人能在飞行中实时变形抓取,如同人类抬手即握的本能反应——无需复杂计算,却能应对混沌环境中的突发交互。
当传统飞行机器人仍在能否抓稳与能否飞稳间艰难平衡时,HI-ARM已实现飞行与操作的有机统一。这种仿生集成设计不仅突破了尺寸与功能的权衡困境,更让空中机器人从会飞的眼睛进化为会飞的手,为灾难救援、家庭服务、野外作业等场景开辟了全新可能。
这项成果于2026年1月30日在线发表于国际顶级期刊《自然·通讯》(Nature Communications)。论文第一作者为浙江大学控制科学与工程学院博士研究生吴钰泽,通讯作者为控制学院长聘副教授高飞。
实验结果
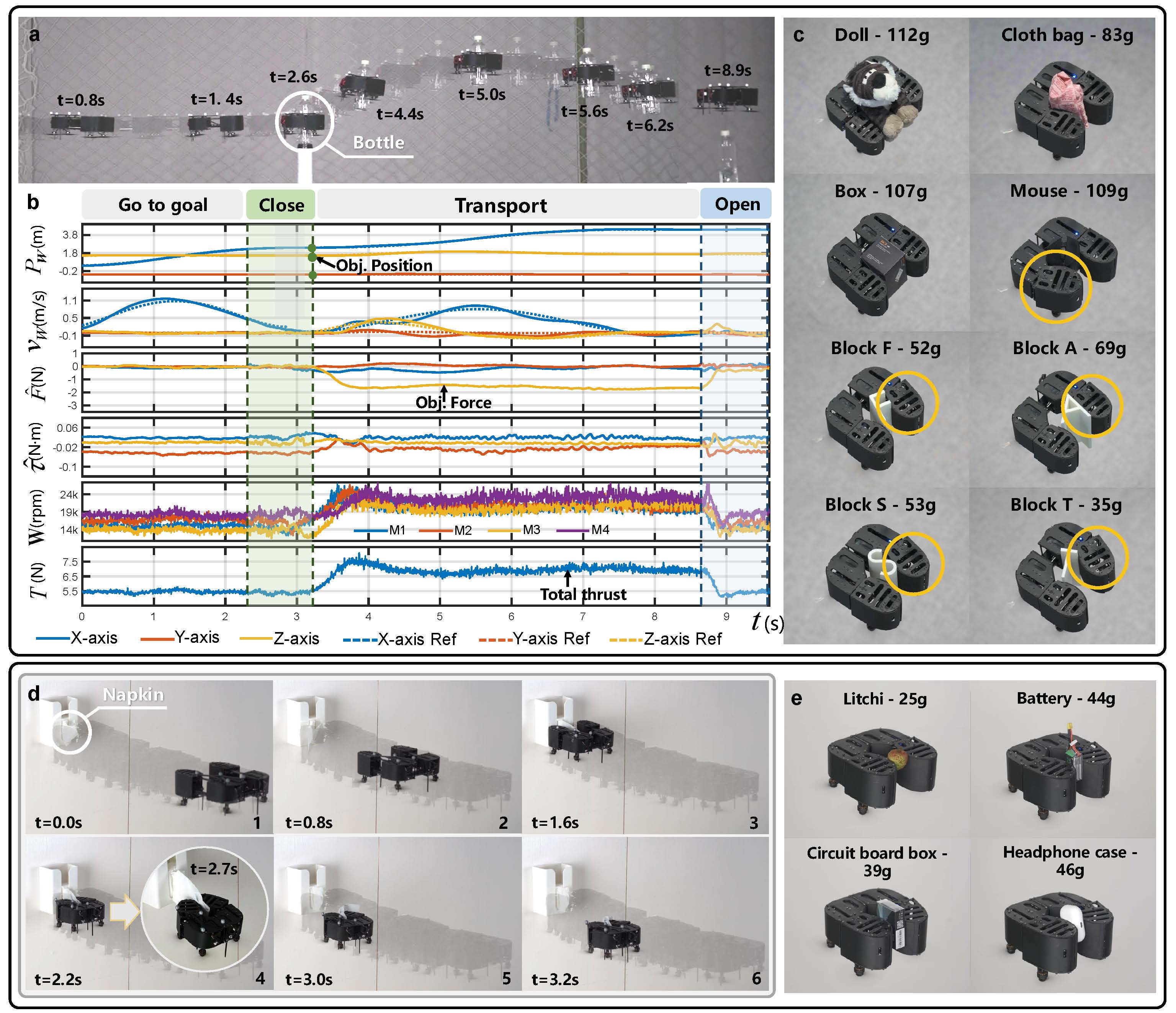
手形抓取的多模态适应性
HI-ARM展现出媲美人手的抓取灵巧性:面对62毫米直径的水瓶,它用掌心稳稳包裹实现强力抓握;面对不足1毫米厚的纸巾,它切换至指尖精准捏取。得益于欠驱动肌腱结构,机器人无需预知物体形状即可自适应贴合表面——无论是规则水瓶、不规则字母积木,还是柔软织物,都能在接触瞬间协同调整5个自由度完成稳定抓取。实验表明,系统在抓取过程中实时估计外部干扰力并动态补偿,位置跟踪误差始终控制在3厘米以内,为精细操作奠定基础。
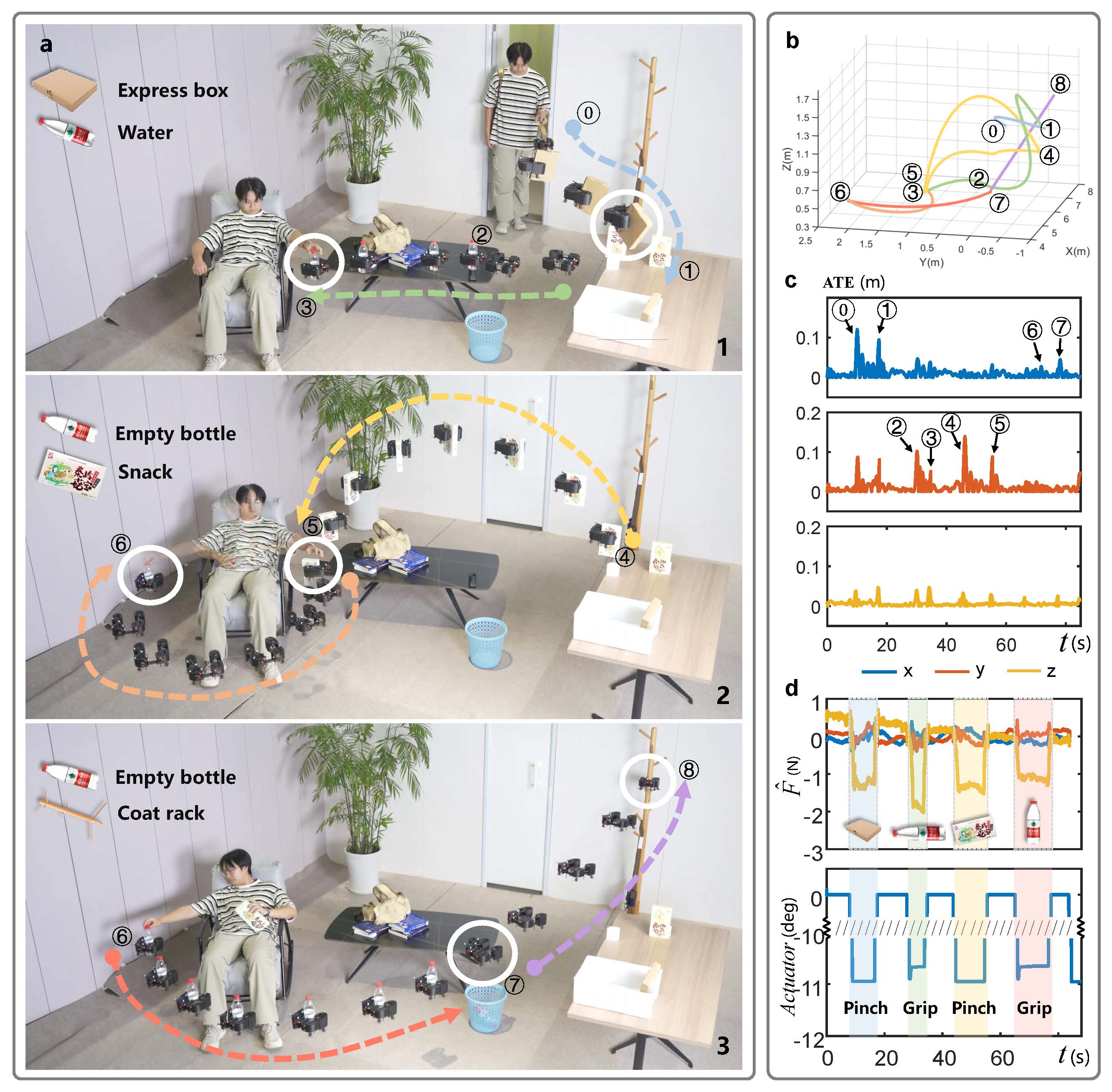
复杂场景下的连续任务能力
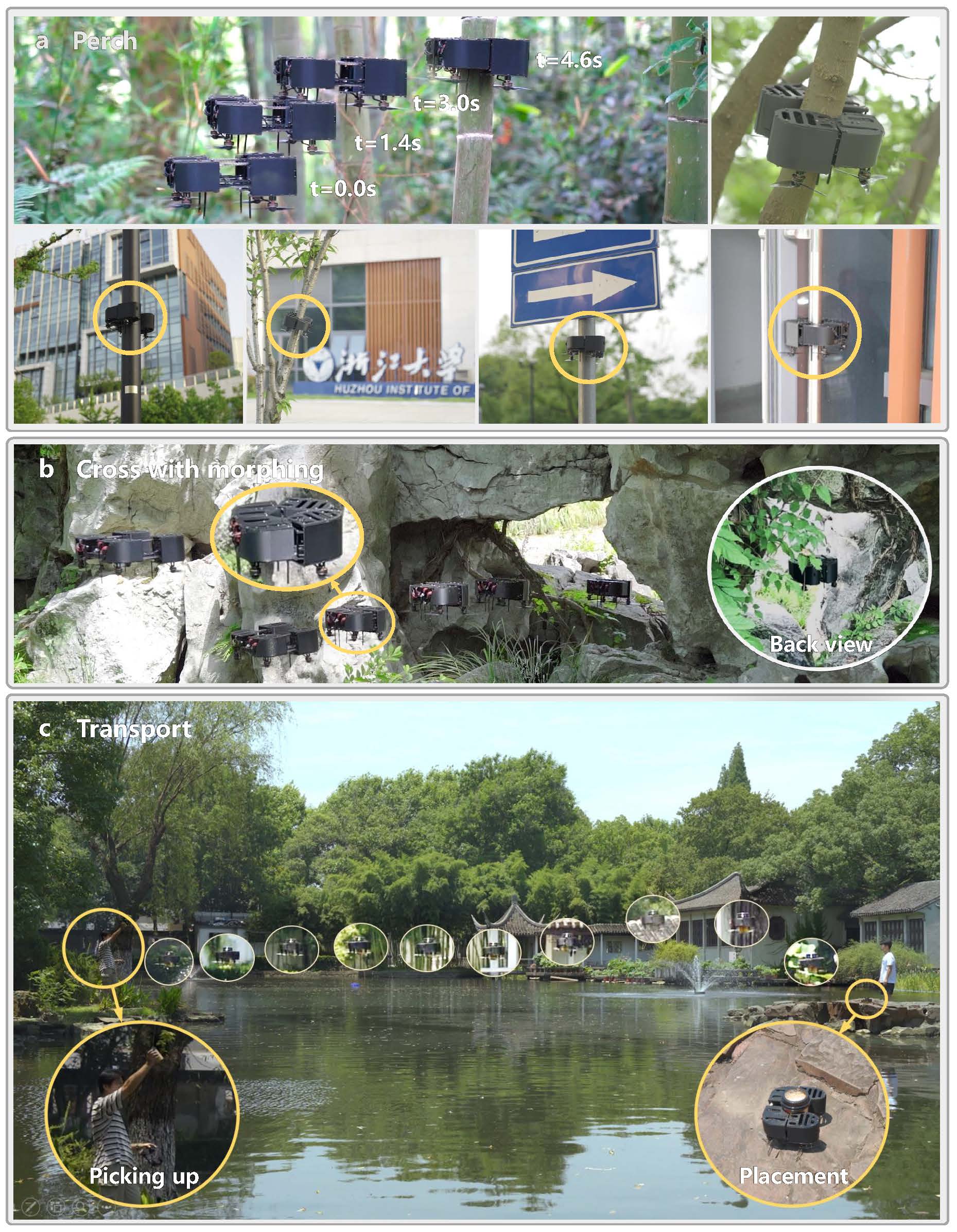
我们在模拟家居环境中设计了连续人机协作任务链:HI-ARM依次完成取快递、递水、收空瓶、挂衣架等动作,全程无需人工干预。面对不同物体,机器人自主切换抓取模式——抓取75克快递盒时采用指尖轻捏,抓取134克水瓶时切换为掌心包裹。更突破性的是,它成功演示了树干栖息(电机停转节能99%)、推门通行等高阶操作。在栖息任务中,机器人抓握树干后完全关闭旋翼,仅靠伺服电机维持抓力,为长时驻留任务提供可能。
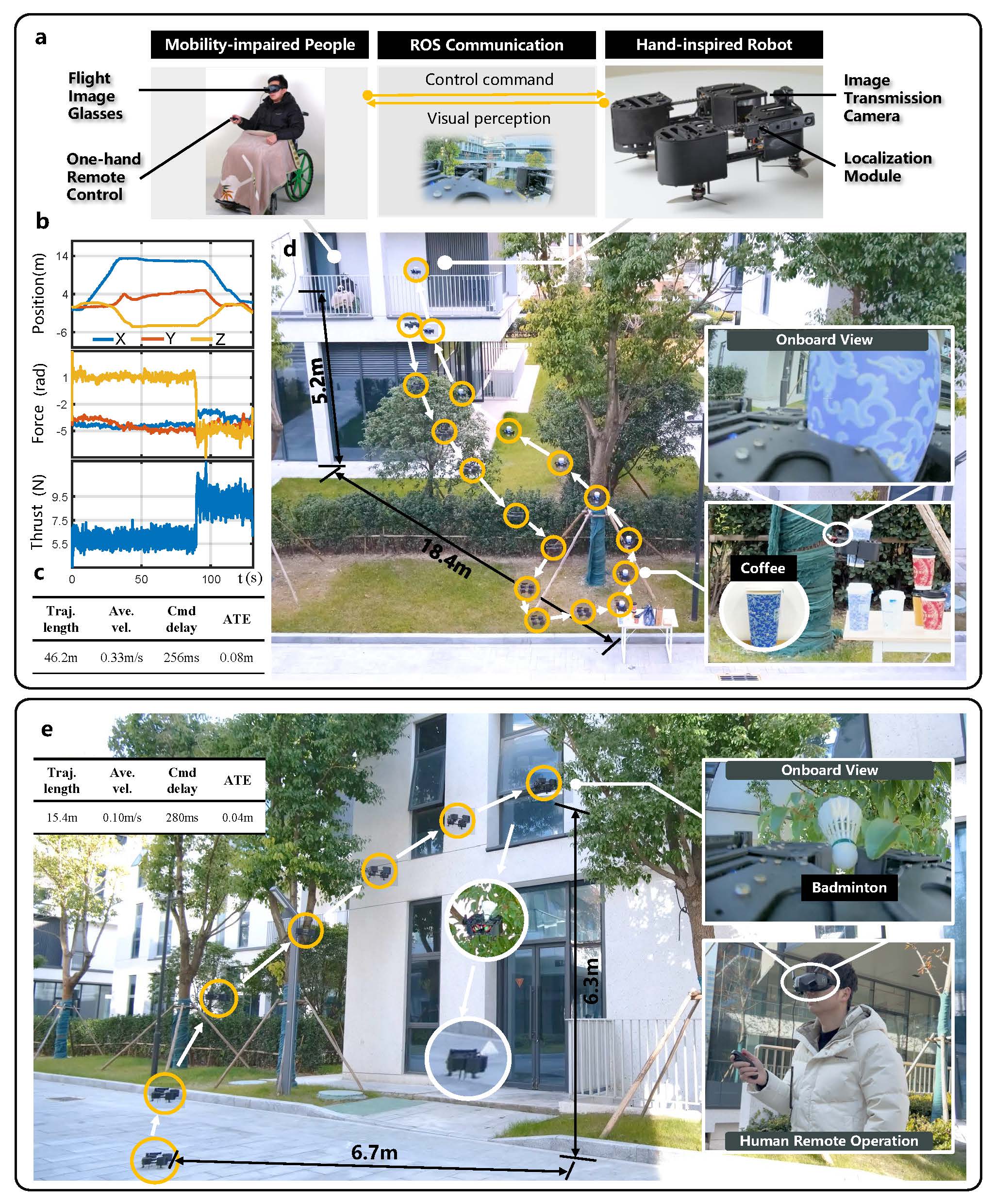
野外环境的极限验证
为检验实用潜力,我们在真实野外开展系列测试:HI-ARM收缩形变穿越仅22厘米宽的岩缝,证明其卓越通过性;跨河运输水杯时,它在湍流干扰下仍保持轨迹平滑,成功将物品送达对岸。针对行动不便人群,我们验证了远程协助能力:用户佩戴FPV眼镜操控HI-ARM,跨越40余米复杂地形取回咖啡杯,控制延迟仅256毫秒。这种空中第三只手的构想,正从科幻走向现实。
当飞行机器人突破观测者的角色局限,真正成为可主动交互的智能体,人机协作的边界将被重新定义。HI-ARM以仿生集成与高效自主为核心,不仅解决了飞行操作机器人的轻量化与多功能矛盾,更铺就了一条通往飞行具身智能的新路径——未来,这些”会飞的手”将有潜力穿梭于家庭、工厂与荒野。
结果讨论和未来工作
我们提出的仿生集成设计通过融合手形结构与高效自主控制框架,成功实现了飞行机器人在复杂环境中的灵巧交互与稳定操作,为空中机器人开辟了从被动观测到主动操作的新范式。这项研究的意义在于,它突破了传统飞行操作平台在尺寸、重量与功能间的根本矛盾——556克的轻量化设计使机器人能深入家庭、工厂等空间受限场景,而多模态自适应抓取能力则显著提升了其在未知环境中的任务泛化性。可预测的飞行轨迹与平滑的形变控制使机器人行为更加透明可靠,这对人机共存环境至关重要:人们能够直观理解机器人的操作意图,从而建立信任感;同时,低延迟的干扰估计与补偿机制也为系统安全监控提供了坚实基础,使机器人能无缝融入日常服务、工业巡检乃至灾难救援等多元场景。
当前系统仍面临视觉定位在长距离户外任务中的累积漂移挑战,以及对极端脆弱物体(如生鸡蛋)的精细力控局限。未来,我们计划引入多模态基础模型增强机器人的环境认知能力,使其能自主识别阀门、开关等工业元件并执行精准操作;同时开发新型内衬抓取表面以提升对光滑物体的摩擦力,并集成力反馈机制实现对易碎物品的温柔抓取。更长远地,我们将探索多机协同作业——基于团队前期在空中集群方面的积累,构建HI-ARM机器人编队,实现协同搬运、分布式感知等复杂任务。随着端到端视觉强化学习技术的发展,我们期待这些改进能逐步缩小仿真与现实的差距,最终让飞行机器人真正成为人类生活中可靠、智能的空中之手。